



|
1780 г.
|
Кривошипно-шатунный механизм
Период
1780 г.
Описание:
Кривошипно-шатунный механизм (КШМ) предназначен для преобразования возвратно-поступательного движения поршня во вращательное движение (например, во вращательное движение коленчатого вала в двигателях внутреннего сгорания), и наоборот. Детали КШМ делят на две группы, это подвижные и неподвижные детали. Подвижные: поршень с поршневыми кольцами, поршневой палец, шатун, коленчатый вал с подшипниками или кривошип, маховик. Неподвижные: блок цилиндров (является базовой деталью двигателя внутреннего сгорания) и представляет собой общую отливку с картером, головка цилиндров, картер маховика и сцепления, нижний картер (поддон), гильзы цилиндров, крышки блока, крепежные детали, прокладки крышек блока, кронштейны, полукольца коленчатого вала. [1]Человечество очень давно изобрело кривошипно-шатунный механизм. Ещё в древнем Китае подобный механизм использовался для подъёма воды из колодца. Плотницкий коловорот, инструмент, предназначенный для сверления отверстий в дереве, в Европе был известен очень давно. Но довольно часто как изобретатель кривошипно-шатунного механизма упоминается арабский учёный Эль-Джазари. Поскольку он не только широко использовал кривошипно-шатунный механизм в устройствах для подъёма воды в ирригационных сооружениях, в которых как источник энергии использовалась сила домашних животных, но и определил способы расчёта этих механизмов.[2]
Источники:
|
|
1782 г.
|
Шотландский механизм
Период
1782 г.
Описание:
Шотландский механизм, или треугольный шатун, (англ. yoke)— это механизм, предназначенный для преобразования прямолинейного движения ползуна во вращательное движение и наоборот. Поршень или другая деталь, совершающая возвратно-поступательное движение, непосредственно соединён со скользящим штырём, вставленным в паз, вынуждающий его совершать вращательное движение. Кривая зависимости смещения поршня от времени является идеальной синусоидой, если штырь вращается с постоянной угловой скоростью.
Источники:
|
|
1784 г.
|
Кривая Уатта

Период
1784 г.
Место:
Великобритания
Описание:
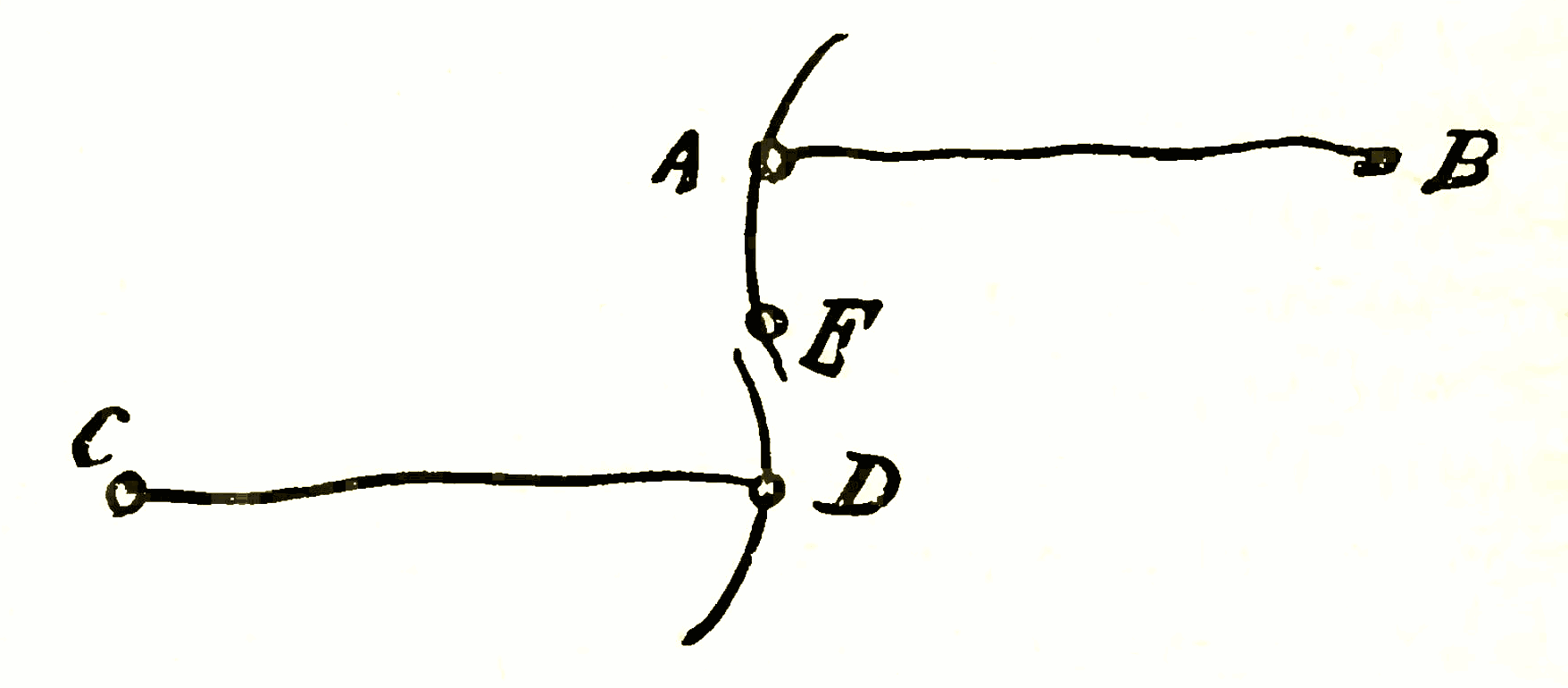
Кривая Уатта (лемнискатоида) — плоская алгебраическая кривая шестого порядка, частный случай кривой скольжения. Определяется как геометрическое место точек центров отрезков одинаковой длины, расположенных концами на двух окружностях одинакового радиуса. Кривая связана с работами Д. Уатта по паровым машинам.
Источники:
Медиаресурсы:
|
|
1784 г.
|
Механизм Ватта
Период
1784 г.
Место:
Великобритания
Описание:
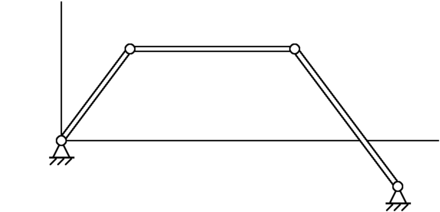
Механизм Уатта (механизм Ватта, параллелограмм Ватта) изобретён Джеймсом Уаттом (19 января 1736— 25 августа 1819) для придания поршню паровой машины прямолинейного движения.Этот механизм не создаёт абсолютно прямолинейного движения, и сам Уатт не стремился добиться этого. Идея использования связей содержалась в письме Ватта к Мэтью Болтону в июне 1784 года. Механизм Уатта используется на задней оси в некоторых автомобильных подвесках в качестве усовершенствования тяги Панара. Оба метода предназначены для предотвращения смещения моста автомобиля вбок относительно его (автомобиля) кузова (или шасси), позволяя мосту, в то же время, двигаться в вертикальном направлении. Механизм Уатта обеспечивает движение, более приближённое к прямолинейному, чем тяга Панара. Механизм состоит из двух горизонтальных балок одинаковой длины, прикреплённых с каждой из сторон шасси. Между этими двумя балками присоединено короткое вертикальное звено. Центр вертикального звена — точка, принуждаемая двигаться вертикально, — присоединено к центру оси. Все места соединения звеньев способны свободно вращаться в вертикальной плоскости. Механизм Уатта можно рассматривать как две тяги Панара, монтируемых друг напротив друга. В конструкции Уатта, однако, искривление движения, присущее тяге Панара, компенсируется поворотом короткого вертикального звена.Также механизм Уатта использован в механизме параллельного движения, являющемся составной частью конструкции некоторых паровых машин.
Источники:
Медиаресурсы:
|
|
1816 г.
|
Механизм планшайба-стержни
Период
1816 г.
Описание:
Механизм планшайба-стержни(шайбовый механизм) — это механизм, используемый в машиностроении для преобразования движения вращающегося вала в возвратно-поступательное движение стержней параллельно оси вала, или для обратного преобразования. Данный механизм состоит из вала, двух дисков, называемых планшайбой, и шарнирно прикреплённых к ним стержней. Если диск перпендикулярен валу, то вращение вала будет вызывать вращение одного из дисков, но стержни будут оставаться в покое. Однако малейшее отклонение диска от перпендикулярного положения приведёт к тому, что любая из точек на краю не вращающегося диска будет совершать колебательное движение. Чем больше угол отклонения вращающегося диска от вертикального положения, тем больше амплитуда указанных колебаний. Если к не вращающемуся диску будут прикреплены стержни, то они будут колебаться вместе с краем диска, то есть совершать возвратно-поступательное движение. Данная конструкция имеет схожие черты с кулачковым механизмом. Данный механизм может быть использован в двигателях внутреннего сгорания вместо коленчатого вала, как это реализовано в аксиальном двигателе. Кроме того, этот механизм используется в двигателях Стирлинга. Как уже упоминалось выше, механизм планшайба-стержни является сердцем аксиально-плунжерных гидромашин (насосов и гидромоторов). В конструкциях вертолётов важную роль играет автомат перекоса лопастей, который может быть построен на базе механизма планшайба-стержни. В этом случае стержни шарнирно соединены с вращающимся диском, а изменением угла наклона неподвижного диска управляет лётчик из кабины через систему кинематических связей. Этот тип управления углом наклона лопастей используется для создания разной подъёмной силы с разных сторон корпуса вертолёта, что приводит к избирательному наклону машины в разных направлениях.
Источники:
|
|
1821 г.
|
Чебышёв, Пафнутий Львович

Период
1821 г.
Место:
Боровский уезд
Описание:
Пафну́тий Льво́вич Чебышёв (4 (16) мая 1821, Окатово, Боровский уезд, Калужская губерния — 26 ноября (8 декабря) 1894, Санкт-Петербург) — русский математик и механик, основоположник петербургской математической школы, академик Петербургской академии наук (с 1859 года) и ещё 24 академий мира.Чебышёв — величайший, наряду с Н. И. Лобачевским, русский математик XIX века. Он получил фундаментальные результаты в теории чисел (распределение простых чисел) и теории вероятностей (центральная предельная теорема, закон больших чисел), построил общую теорию ортогональных многочленов, теорию равномерных приближений и многие другие. Основал математическую теорию синтеза механизмов и разработал ряд практически важных концепций механизмов.
Источники:
|
|
1847 г.
|
Чебышёв П.Л. — адъюнкт-профессор

Период
1847 г.
Место:
Петербург, Российская Империя
Описание:
В 1847 году Чебышёв был утверждён в звании адъюнкт-профессора Петербургского университета. Чтобы получить право чтения лекций в университете, он защитил ещё одну диссертацию — на тему "Об интегрировании с помощью логарифмов", после чего читал лекции по высшей алгебре, теории чисел, геометрии, теории эллиптических функций и практической механике. В области механики П. Л. Чебышёва интересовали вопросы прикладной механики и в особенности — теории механизмов; последней посвящено около 15 работ учёного. Он не опубликовал ни одной работы по общим вопросам теоретической механики, однако в ряде работ его учеников (П. И. Сомов, А. М. Ляпунов, Д. А. Граве), относившихся к области теоретической механики, нашли своё отражение идеи, подсказанные их учителем. Фактически П. Л. Чебышёв возглавил после смерти М. В. Остроградского петербургскую ветвь самобытной русской школы механики. Что касается теории механизмов, то историки науки выделяют три сложившиеся в России во 2-й половине XIX века научные школы в этой области: П. Л. Чебышёва в Петербурге (оформившаяся ранее двух остальных), В. Н. Лигина в Одессе и Н. Е. Жуковского в Москве. Под влиянием бесед с Чебышёвым задачами кинематики механизмов заинтересовались английские математики Дж. Сильвестр и А. Кэли.
Источники:
|
|
с 1850 г. по 1854 г.
|
Синтез механизмов
Период
с 1850 г. по 1854 г.
Место:
Петербург, Российская Империя
Описание:
В 1850-е годы Чебышёв заинтересовался шарнирно-рычажными механизмами, служащими для приближённого преобразования кругового движения в прямолинейное и наоборот. К числу таких механизмов относится параллелограмм Уатта, сконструированный изобретателем универсальной паровой машины Дж. Уаттом как раз для преобразования прямолинейного возвратно-поступательного движения штока (жёстко связанного с поршнем паровой машины) в качательное движение конца балансира. К середине XIX века подобных механизмов было известно немного, параметры их звеньев подбирались эмпирически, в то время как неизбежные неточности прямого хода приводили к росту потерь на трение и быстрому изнашиванию звеньев. Чебышёв поставил задачу целенаправленного нахождения параметров искомого механизма с тем, чтобы на некотором заданном отрезке максимальное отклонение траектории рабочей точки механизма от её касательной в средней точке наименее уклонялось от нуля по сравнению с другими аналогичными траекториями. Решая данную задачу, учёный пришёл к созданию нового раздела теории приближения функций — теории функций, наименее уклоняющихся от нуля. Полученные результаты Чебышёв изложил в работе "Теория механизмов, известных под названием параллелограммов" (1854), став основоположником математической теории синтеза механизмов. Методы теории функций, наименее уклоняющихся от нуля, П. Л. Чебышёв применил также в работах о центробежном регуляторе (где требовалось обеспечить изохронность хода механизма) и о зубчатых колёсах (для построения при помощи дуг окружностей профиля зуба, позволяющего добиться близости отношения угловых скоростей колёс к требуемому значению).
Источники:
|
|
1853 г.
|
Механизм Саррюса
Период
1853 г.
Описание:
Механизм Саррюса (англ. Sarrus linkage) — механизм, изобретённый 1853 году Пьером Саррюсом, преобразующий ограниченное движение по окружности в прямолинейное движение без использования направляющих. Он состоит из нескольких шарнирно-сочленённых прямоугольных пластин, две из которых остаются параллельными, но могут двигаться друг к другу. Механизм Саррюса принадлежит к классу пространственных механизмов, в отличие от механизма Липкина-Посселье, являющегося плоским механизмом. Хотя Чарльз-Николя Посселье считается первым изобретателем механизма прямолинейного движения, механизм Саррюса был изобретён ранее; однако по большей части это не признаётся.
Источники:
|
|
1864 г.
|
Механизм Липкина — Посселье
Период
1864 г.
Описание:
Механизм Липкина — Посселье (англ. – Lipkin linkage), изобретённый в 1864 году, был первым плоским механизмом, способным преобразовывать вращательное движение в совершенное прямолинейное (инверсор), и наоборот. Назван в честь французского офицера Шарля Николя Посселье (1832—1913) и российского математика Липмана (Йом-Това) Израилевича Липкина. До этого изобретения существовавшие методы создания прямолинейного движения требовали наличия направляющих, что особенно значимо для деталей машин и для технологических процессов. В частности, без использования этого или подобных ему изобретений поршень в поршневом насосе нуждается в прочной заделке в месте крепления к штоку (см. плунжер). Это изобретение сыграло важную роль в развитии паровых машин. Математическое описание механизма Липкина — Посселье прямо связано с инверсией окружности. Существует также более ранний механизм прямолинейного движения, история которого недостаточно хорошо известна,— механизм Саррюса. Этот механизм появился на 11 лет раньше механизма Липкина-Посселье. Он состоит из нескольких шарнирно-сочленённых прямоугольных пластин, две из которых остаются параллельными, но могут двигаться друг к другу. Механизм Саррюса принадлежит к классу пространственных механизмов, в отличие от механизма Липкина-Посселье, являющегося плоским механизмом.
Источники:
|
|
1869 г.
|
Формула Чебышёва
Период
1869 г.
Место:
Петербург, Российская Империя
Описание:
Структура механизмов. Чебышёв положил также начало теории структуры плоских механизмов. В работе "О параллелограммах" (1869) он для рычажных механизмов с вращательными кинематическими парами и одной степенью свободы вывел структурную формулу (ныне известную как формула Чебышёва) — тождество, которому должен удовлетворять каждый такой механизм: 3m – 2(n + v) = 1 где m — число подвижных звеньев, n и v — числа соответственно подвижных и неподвижных шарниров. Эта формула только по недоразумению носит название формулы Грюблера — немецкого учёного, открывшего её на 14 лет позднее Чебышева. Конструирование механизмов. Чебышёву принадлежит создание свыше 40 различных механизмов и около 80 их модификаций. Среди них — механизмы с остановками, механизмы выпрямителей и ускорителей движения и тому подобные механизмы, многие из которых находят применение в современном авто-, мото- и приборостроении. В конструкциях ряда механизмов, предложенных П. Л. Чебышёвым, нашли свою реализацию разработанные им методы синтеза механизмов. Здесь прежде всего заслуживают упоминания два приближённо-направляющих механизма Чебышёва, относящихся к классу шарнирных четырёхзвенников и известных под названиями лямбдаобразного и перекрёстного. В данных механизмах траектория заданной точки P, расположенной на шатуне (у лямбдаобразного механизма — на конце шатуна, у перекрёстного — посередине), весьма мало отличается на некотором участке от отрезка прямой. В то же время минимальное число звеньев для механизма с вращательными кинематическими парами, обеспечивающее точное прямолинейное движение для одной из своих точек, равно 6.
Источники:
|
|
1875 г.
|
Шарнирный четырёхзвенник
Период
1875 г.
Описание:
Шарни́рный четырёхзве́нник — плоский механизм из четырёх звеньев, соединенных между собой вращательными кинематическими парами. Одно из этих звеньев в теории механизмов и машин принимают за стойку, т. е. неподвижное звено (хотя, например, для механизмов транспортных машин понятие неподвижности стойки оказывается условностью, поскольку в этом случае сама стойка движется). Для звеньев плоских механизмов в теории механизмов и машин используют следующую терминологию: кривошип — звено плоского механизма, которое образует вращательную пару со стойкой и может совершать вокруг оси пары полный оборот; коромысло — звено плоского механизма, которое образует вращательную пару со стойкой, но не может совершать полный оборот вокруг оси пары; шатун — звено плоского механизма, связанное вращательными парами с подвижными его звеньями, но не со стойкой. Для шарнирного четырёхзвенника справедлива доказанная немецким механиком Ф. Грасгофом теорема Грасгофа о шарнирном четырёхзвеннике (иногда её также называют правилом Грасгофа): "Наименьшее звено является кривошипом, если сумма длин наименьшего и любого другого звена меньше суммы длин остальных двух звеньев (под наименьшим понимается звено минимальной длины)."
Источники:
Медиаресурсы:
|
|
1878 г.
|
Механизм Чебышёва
Период
1878 г.
Место:
Петербург, Российская Империя
Описание:
Механизм Чебышёва — механизм, преобразующий вращательное движение в движение, приближённое к прямолинейному. Прямолинейное движение определяется движением точки P — средней точки звена L3, расположенной посередине между двумя крайними точками сцепки данного четырёхзвенного механизма. (L1, L2, L3, и L4 показаны на иллюстрации). При движении по участку, показанному на иллюстрации, точка Р отклоняется от идеального прямолинейного движения. Соотношения между длинами звеньев таковы: L1 : L2 : L3 = 2 : 2.5 : 1 = 4 : 5 : 2. На основании описанного механизма Чебышёв изготовил первый в мире шагающий механизм (стопоходящую машину), имитировавший движение животного при ходьбе, который пользовался большим успехом на Всемирной выставке в Париже в 1878 году, а в настоящее время хранится в московском Политехническом музее.
Источники:
Медиаресурсы:
|
|
1940 г.
|
Механизм Хойкена

Период
1940 г.
Описание:
Механизм Хойкена (англ. Hoekens linkage) — это четырёхзвенный механизм, преобразующий вращательное движение в приближённо прямолинейное. Этот механизм является подобным механизму Чебышёва. Соотношения между звеньями механизма показаны на иллюстрации. Преобразование вращательного движения в приближённо прямолинейное можно осуществить также с помощью следующих устройств: кривошипно-шатунный механизм; механизм Ватта; механизм Липкина — Посселье; механизм Саррюса.
Источники:
Медиаресурсы:
|
|
1994 г.
|
Механизм Кланна
Период
1994 г.
Место:
США
Описание:
Механизм Кланна (англ. Klann linkage) — это плоский механизм, имитирующий походку животных и способный служить в качестве замены колесу. Механизм состоит из вращающегося звена, кривошипа, двух шатунов и двух сцепок. Все звенья соединены плоскими шарнирами. Пропорции каждого из звеньев механизма определяются необходимостью приблизить к линейному характер движения ножки. За первые пол-оборота кривошипа ножка перемещается приближённо линейно, а за оставшиеся пол-оборота она поднимается на заданную высоту, прежде чем вернуться в исходное положение, и цикл начнётся снова. Два таких механизма, соединённые вместе через кривошипы, и сдвинутые друг относительно друга по фазе на пол-цикла, позволяют корпусу машины перемещаться параллельно земле. Механизм Кланна имеет множество преимуществ шагающего механизма, и лишён, в то же время, некоторых свойственных им ограничений. Он может перешагивать через бордюры, взбираться по ступеням, которые недоступны для колёсных движителей, и в то же время этот механизм не требует управления его двигателями со стороны микропроцессоров, причём количество этих двигателей может быть уменьшено по сравнению с другими видами техники, предназначенной для выполнения тех же функций. По своей классификации этот механизм находится между шагающими устройствами и колёсными машинами с управляемыми осями. Механизм Кланна является не первым шагающим механизмом. Первый в мире шагающий механизм изготовил Пафнутий Чебышёв на основе своего механизма, преобразующего вращательное движение в прямолинейное. Этот шагающий механизм Чебышёва пользовался большим успехом на Всемирной выставке в Париже в 1878 году. Механизм Кланна был разработан Джо Кланном (Joe Klann) в 1994 году как приложение к теории Бёрместера, используемой при расчётах двухшатунных четырёхзвенных механизмов. Он классифицируется как кинематическая цепь Стефенсона III типа.
Источники:
Медиаресурсы:
|
Кривошипно-шатунный механизм (КШМ) предназначен для преобразования возвратно-поступательного движения поршня во вращательное движение (например, во вращательное движение коленчатого вала в двигателях внутреннего сгорания), и наоборот. Детали КШМ делят на две группы, это подвижные и неподвижные детали. Подвижные: поршень с поршневыми кольцами, поршневой палец, шатун, коленчатый вал с подшипниками или кривошип, маховик. Неподвижные: блок цилиндров (является базовой деталью двигателя внутреннего сгорания) и представляет собой общую отливку с...
Кривая Уатта (лемнискатоида) — плоская алгебраическая кривая шестого порядка, частный случай кривой скольжения. Определяется как геометрическое место точек центров отрезков одинаковой длины, расположенных концами на двух окружностях одинакового радиуса. Кривая связана с работами Д. Уатта по паровым машинам.
| Документы | |
| Uravneniya_krivoi_Uatta.docx | Скачать |
Механизм Уатта (механизм Ватта, параллелограмм Ватта) изобретён Джеймсом Уаттом (19 января 1736— 25 августа 1819) для придания поршню паровой машины прямолинейного движения.Этот механизм не создаёт абсолютно прямолинейного движения, и сам Уатт не стремился добиться этого. Идея использования связей содержалась в письме Ватта к Мэтью Болтону в июне 1784 года. Механизм Уатта используется на задней оси в некоторых автомобильных подвесках в качестве усовершенствования тяги Панара. Оба метода предназначены для предотвращения смещения моста автомобиля вбок...
Механизм планшайба-стержни(шайбовый механизм) — это механизм, используемый в машиностроении для преобразования движения вращающегося вала в возвратно-поступательное движение стержней параллельно оси вала, или для обратного преобразования. Данный механизм состоит из вала, двух дисков, называемых планшайбой, и шарнирно прикреплённых к ним стержней. Если диск перпендикулярен валу, то вращение вала будет вызывать вращение одного из дисков, но стержни будут оставаться в покое. Однако малейшее отклонение диска от перпендикулярного положения...
Пафну́тий Льво́вич Чебышёв (4 (16) мая 1821, Окатово, Боровский уезд, Калужская губерния — 26 ноября (8 декабря) 1894, Санкт-Петербург) — русский математик и механик, основоположник петербургской математической школы, академик Петербургской академии наук (с 1859 года) и ещё 24 академий мира.Чебышёв — величайший, наряду с Н. И. Лобачевским, русский математик XIX века. Он получил фундаментальные результаты в теории чисел (распределение простых чисел) и теории вероятностей (центральная предельная теорема, закон больших чисел), построил общую теорию ортогональных...
В 1847 году Чебышёв был утверждён в звании адъюнкт-профессора Петербургского университета. Чтобы получить право чтения лекций в университете, он защитил ещё одну диссертацию — на тему "Об интегрировании с помощью логарифмов", после чего читал лекции по высшей алгебре, теории чисел, геометрии, теории эллиптических функций и практической механике. В области механики П. Л. Чебышёва интересовали вопросы прикладной механики и в особенности — теории механизмов; последней посвящено около 15 работ учёного. Он не опубликовал ни одной работы по общим вопросам...
В 1850-е годы Чебышёв заинтересовался шарнирно-рычажными механизмами, служащими для приближённого преобразования кругового движения в прямолинейное и наоборот. К числу таких механизмов относится параллелограмм Уатта, сконструированный изобретателем универсальной паровой машины Дж. Уаттом как раз для преобразования прямолинейного возвратно-поступательного движения штока (жёстко связанного с поршнем паровой машины) в качательное движение конца балансира. К середине XIX века подобных механизмов было известно немного, параметры их звеньев...
Механизм Саррюса (англ. Sarrus linkage) — механизм, изобретённый 1853 году Пьером Саррюсом, преобразующий ограниченное движение по окружности в прямолинейное движение без использования направляющих. Он состоит из нескольких шарнирно-сочленённых прямоугольных пластин, две из которых остаются параллельными, но могут двигаться друг к другу. Механизм Саррюса принадлежит к классу пространственных механизмов, в отличие от механизма Липкина-Посселье, являющегося плоским механизмом. Хотя Чарльз-Николя Посселье считается первым изобретателем механизма...
Механизм Липкина — Посселье (англ. – Lipkin linkage), изобретённый в 1864 году, был первым плоским механизмом, способным преобразовывать вращательное движение в совершенное прямолинейное (инверсор), и наоборот. Назван в честь французского офицера Шарля Николя Посселье (1832—1913) и российского математика Липмана (Йом-Това) Израилевича Липкина. До этого изобретения существовавшие методы создания прямолинейного движения требовали наличия направляющих, что особенно значимо для деталей машин и для технологических процессов. В частности, без использования этого...
Структура механизмов.
Чебышёв положил также начало теории структуры плоских механизмов. В работе "О параллелограммах" (1869) он для рычажных механизмов с вращательными кинематическими парами и одной степенью свободы вывел структурную формулу (ныне известную как формула Чебышёва) — тождество, которому должен удовлетворять каждый такой механизм: 3m – 2(n + v) = 1 где m — число подвижных звеньев, n и v — числа соответственно подвижных и неподвижных шарниров. Эта формула только по недоразумению носит название формулы Грюблера — немецкого учёного, открывшего...
Шарни́рный четырёхзве́нник — плоский механизм из четырёх звеньев, соединенных между собой вращательными кинематическими парами. Одно из этих звеньев в теории механизмов и машин принимают за стойку, т. е. неподвижное звено (хотя, например, для механизмов транспортных машин понятие неподвижности стойки оказывается условностью, поскольку в этом случае сама стойка движется). Для звеньев плоских механизмов в теории механизмов и машин используют следующую терминологию: кривошип — звено плоского механизма, которое образует вращательную пару со...
| Изображения | |
| Документы | |
| Teorema_Grasgofa_o_sharnirnom_1.docx | Скачать |
Механизм Чебышёва — механизм, преобразующий вращательное движение в движение, приближённое к прямолинейному. Прямолинейное движение определяется движением точки P — средней точки звена L3, расположенной посередине между двумя крайними точками сцепки данного четырёхзвенного механизма. (L1, L2, L3, и L4 показаны на иллюстрации). При движении по участку, показанному на иллюстрации, точка Р отклоняется от идеального прямолинейного движения. Соотношения между длинами звеньев таковы: L1 : L2 : L3 = 2 : 2.5 : 1 = 4 : 5 : 2. На основании описанного механизма Чебышёв...
| Изображения | |
| Документы | |
| LebedevVV.pdf | Скачать |
Механизм Хойкена (англ. Hoekens linkage) — это четырёхзвенный механизм, преобразующий вращательное движение в приближённо прямолинейное. Этот механизм является подобным механизму Чебышёва. Соотношения между звеньями механизма показаны на иллюстрации. Преобразование вращательного движения в приближённо прямолинейное можно осуществить также с помощью следующих устройств: кривошипно-шатунный механизм; механизм Ватта; механизм Липкина — Посселье; механизм Саррюса.
| Документы | |
| Chap_03_3ed_p134.pdf | Скачать |
Механизм Кланна (англ. Klann linkage) — это плоский механизм, имитирующий походку животных и способный служить в качестве замены колесу. Механизм состоит из вращающегося звена, кривошипа, двух шатунов и двух сцепок. Все звенья соединены плоскими шарнирами. Пропорции каждого из звеньев механизма определяются необходимостью приблизить к линейному характер движения ножки. За первые пол-оборота кривошипа ножка перемещается приближённо линейно, а за оставшиеся пол-оборота она поднимается на заданную высоту, прежде чем вернуться в исходное положение, и цикл...